


更多
新闻推荐
行业动态
米乐m6棋牌官网最新版.西门子Sinamics S120的抱闸功能设置中经

调试完抱闸后发现抱闸打开的时候会出现溜车,或者激活抱闸功能后出现打不开抱闸的情况,本文主要针对
可通过驱动系统输出由工艺计算与负载相关的设定转矩后,在考虑抱闸,机械等动作时序后执行开抱闸操作。其基本控制原理如下:
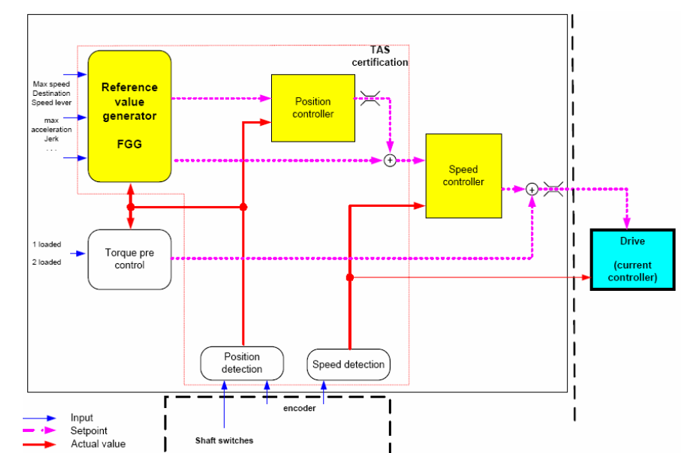
载荷预置转矩:根据机械设备及负载测量计算预置转矩。这个预置转矩在速度使能后,立即输出理论上抵消载荷的转矩设定,而速度输出仅做微小的动态补偿,进而是实际转速快速跟随转速给定,极大的消除或减小溜车现象,保证提升设备快速平稳启动,从而提高安全性与效率。
加速度预置转矩:根据机械设备的惯量来计算加速度转矩,同样在速度使能后,叠加于转矩给定。

Q: 在扩展抱闸缺省设置下速度调节器使能p1152设置为开闸控制命令r899.15,但是r899.15只有在抱闸打开时方能为1,这样逻辑互锁,导致无法打开抱闸。
抱闸时序,由高到低:抱闸配置参数P1215→参数P1219[0..2]和P855→静态识别→模拟量互联使用阈值判断的控制指令。不同的优先级可以在一些复杂应用环境中,更好的去通过抱闸去保护机械设备,减少人员和财产的损失。
如果采用转矩电流或者转矩做为开抱闸的阈值,那么需要注意Stop2状态,在打开抱闸过程中有P1216延迟时间。该状态下,脉冲虽然使能,但转速还未被使能,是一个中间状态,如果使用转矩实际值r80开抱闸,实际通过trace可以发现如果P1216的设置不合理,转矩在stop2过程中是变化的。

P1216的开闸延时需要根据实际抱闸动作的机械时间进行设置,该参数设置不合理不仅仅影响到抱闸的使用寿命,同时还影响到开抱闸瞬间电流和转矩的波动。
抱闸在一些应用场合中需要快速动作,比如起重机,在带手动控制装置的起重机上,变频器必须立即对控制杆即主控开关的动作作出响应。
驱动通过“ON”指令(p0840)上电(脉冲已使能)。而转速设定值(p1142)和转速(p0856)处于锁定状态。电机已充磁。因而省去了交流电机上通常需要的充磁时间,大约 1-2 秒。
现在,在主控开关偏转和电机旋转之间只间隔了制动打开时间。一旦主控开关偏转,便发出“来自控制系统的设定值使能”(该位和 p1142、r1229.3、p1224.0 互联)。立即使能转速。在制动打开时间(p1216) 届满后,使能转速设定值。
主控开关处于零位时,转速设定值被锁定,驱动沿着斜坡函数发生器的下降斜坡减速。一旦低出静态极限(p1226),制动立即闭合。在制动闭合时间(p1217)结束后,转速被锁定,现在电机无法旋转。
需要注意的是,上诉设置变频器始终处于使能状态。可以结合工艺情况,判断如果电机不在工作状态下,需要将变频器脉冲封锁。

上诉零速检测逻辑的三个条件中,第二个和第三个的逻辑条件需要关闭,关闭的方法是P1276和P1227的延时时间设置为300s。此时装置关闭抱闸的条件只剩下实际速度检测是零速。
在紧急制动情况下电机需要同时达到电气制动和机械制动。此时, 可以将OFF3用作紧急制动的触发信号:p1219[0]=r0898.2和p1275.00=1(OFF3触发“立即闭合制动”,取反信号)应将OFF3 减速时间(p1135)设为 0 秒,防止变频器在制动闭合时运行。电机内可能会产生再生电能,因此必须将该电能反馈到电网中或通过制动电阻消耗。
的故障报警方法 /
的一款高端驱动器,设计用于机械和设备工程的复杂应用,以及广泛的运动控制任务。产品组合涵盖的功率范围广,控制方式丰富,可用于各种驱动任务。
的驱动控制任务,同时它配备有编程软STARTER,使得参数的设定和驱动控制过程的监控以及故障诊断
的驱动控制任务,同时它配备有编程软STARTER,使得参数的设定和驱动控制过程的监控以及故障诊断
【米尔-全志T113-i开发板试用】发布opencv-mobile米尔t113i专享预编译包
 在线咨询
在线咨询